
2022
re
Jähnichen, S., Weber, F., Prentice, M., Lieder, F.
Does deliberate prospection help students set better goals?
KogWis 2022 "Understanding Minds", September 2022 (poster) Accepted
2021
re
Frederic Becker, , Lieder, F.
Promoting metacognitive learning through systematic reflection
The first edition of Life Improvement Science Conference, June 2021 (poster)
ei
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)
2020
dlg
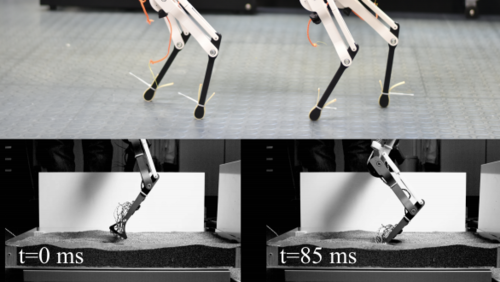
Milad Shafiee Ashtiani, A. A. S., Badri-Sproewitz, A.
Towards Hybrid Active and Passive Compliant Mechanisms in Legged Robots
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, October 2020 (poster) Accepted
dlg
Drama, Ö., Badri-Spröwitz, A.
VP above or below? A new perspective on the story of the virtual point
Dynamic Walking, May 2020 (poster)
dlg
Mo, A., Izzi, F., Haeufle, D. F. B., Badri-Spröwitz, A.
Viscous Damping in Legged Locomotion
Dynamic Walking, May 2020 (poster)
dlg
Ruppert, F., Badri-Spröwitz, A.
How Quadrupeds Benefit from Lower Leg Passive Elasticity
Dynamic Walking, May 2020 (poster)
dlg
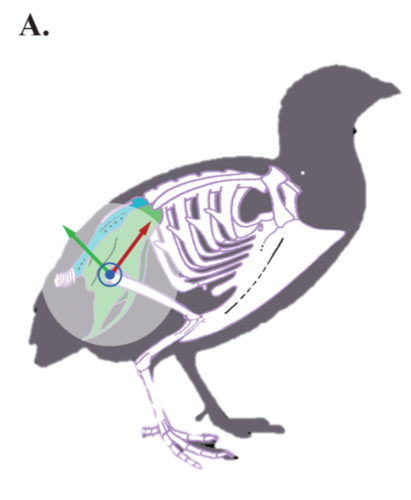
Kamska, V., Daley, M., Badri-Spröwitz, A.
Potential for elastic soft tissue deformation and mechanosensory function within the lumbosacral spinal canal of birds
Society for Integrative and Comparative Biology Annual Meeting (SICB Annual Meeting 2020), January 2020 (poster)

avg
Janai, J., Güney, F., Behl, A., Geiger, A.
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
Arxiv, Foundations and Trends in Computer Graphics and Vision, 2020 (book)
2019
ei
Meding, K., Schölkopf, B., Wichmann, F. A.
Perception of temporal dependencies in autoregressive motion
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
ei
Bruijns, S. A., Meding, K., Schölkopf, B., Wichmann, F. A.
Phenomenal Causality and Sensory Realism
Perception, 48(2-suppl):141, 42nd European Conference on Visual Perception (ECVP), August 2019 (poster)
ei
Shao, K., Logothetis, N., Besserve, M.
Neural mass modeling of the Ponto-Geniculo-Occipital wave and its neuromodulation
28th Annual Computational Neuroscience Meeting (CNS*2019), July 2019 (poster)
ics
Mager, F., Baumann, D., Jacob, R., Thiele, L., Trimpe, S., Zimmerling, M.
Demo Abstract: Fast Feedback Control and Coordination with Mode Changes for Wireless Cyber-Physical Systems
Proceedings of the 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 340-341, 18th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), April 2019 (poster)
mms
Keskinbora, K.
Prototyping Micro- and Nano-Optics with Focused Ion Beam Lithography
SL48, pages: 46, SPIE.Spotlight, SPIE Press, Bellingham, WA, 2019 (book)
2018
ics
Mager, F., Baumann, D., Trimpe, S., Zimmerling, M.
Poster Abstract: Toward Fast Closed-loop Control over Multi-hop Low-power Wireless Networks
Proceedings of the 17th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), pages: 158-159, Porto, Portugal, April 2018 (poster)
ei
Goris, R., Henaff, O., Meding, K.
Representation of sensory uncertainty in macaque visual cortex
Computational and Systems Neuroscience (COSYNE) 2018, March 2018 (poster)
ei
Safavi, S., Panagiotaropoulos, T., Kapoor, V., Logothetis, N. K., Besserve, M.
Generalized phase locking analysis of electrophysiology data
7th AREADNE Conference on Research in Encoding and Decoding of Neural Ensembles, 2018 (poster)
ei
Pérez-Pellitero, E., Sajjadi, M. S. M., Hirsch, M., Schölkopf, B.
Photorealistic Video Super Resolution
Workshop and Challenge on Perceptual Image Restoration and Manipulation (PIRM) at the 15th European Conference on Computer Vision (ECCV), 2018 (poster)
ei
Meding, K., Hirsch, M., Wichmann, F. A.
Retinal image quality of the human eye across the visual field
14th Biannual Conference of the German Society for Cognitive Science (KOGWIS 2018), 2018 (poster)
2017
ei
Aghaeifar, A., Loktyushin, A., Eschelbach, M., Scheffler, K.
Improving performance of linear field generation with multi-coil setup by optimizing coils position
Magnetic Resonance Materials in Physics, Biology and Medicine, 30(Supplement 1):S259, 34th Annual Scientific Meeting of the European Society for Magnetic Resonance in Medicine and Biology (ESMRMB), October 2017 (poster)
ei
Loktyushin, A., Ehses, P., Schölkopf, B., Scheffler, K.
Estimating B0 inhomogeneities with projection FID navigator readouts
25th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), April 2017 (poster)
ei
Feng, X., Loktyushin, A., Deistung, A., Reichenbach, J.
Image Quality Improvement by Applying Retrospective Motion Correction on Quantitative Susceptibility Mapping and R2*
25th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), April 2017 (poster)
ei
Peters, J., Janzing, D., Schölkopf, B.
Elements of Causal Inference - Foundations and Learning Algorithms
Adaptive Computation and Machine Learning Series, The MIT Press, Cambridge, MA, USA, 2017 (book)
pi
Sitti, M.
Mobile Microrobotics
Mobile Microrobotics, The MIT Press, Cambridge, MA, 2017 (book)
ei
Safavi, S., Panagiotaropoulos, T., Kapoor, V., Logothetis, N. K., Besserve, M.
Generalized phase locking analysis of electrophysiology data
ESI Systems Neuroscience Conference (ESI-SyNC 2017): Principles of Structural and Functional Connectivity, 2017 (poster)
2016
ei
Loktyushin, A., Ehses, P., Schölkopf, B., Scheffler, K.
Autofocusing-based correction of B0 fluctuation-induced ghosting
24th Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine (ISMRM), May 2016 (poster)
am
Oh, Y., Sutanto, G., Mistry, M., Schweighofer, N., Schaal, S.
Distinct adaptation to abrupt and gradual torque perturbations with a multi-joint exoskeleton robot
Abstracts of Neural Control of Movement Conference (NCM 2016), Montego Bay, Jamaica, April 2016 (poster)
ei
Katiyar, P., Castaneda, S., Patzwaldt, K., Russo, F., Poli, S., Ziemann, U., Disselhorst, J. A., Pichler, B. J.
Novel Random Forest based framework enables the segmentation of cerebral ischemic regions using multiparametric MRI
European Molecular Imaging Meeting, 2016 (poster)
ei
Logothetis, N. K., Murayama, Y., Ramirez-Villegas, J. F., Besserve, M., Evrard, H.
PGO wave-triggered functional MRI: mapping the networks underlying synaptic consolidation
47th Annual Meeting of the Society for Neuroscience (Neuroscience), 2016 (poster)
ei
Castaneda, S., Katiyar, P., Russo, F., Maurer, A., Patzwaldt, K., Poli, S., Calaminus, C., Disselhorst, J. A., Ziemann, U., Pichler, B. J.
Multiparametric Imaging of Ischemic Stroke using [89Zr]-Desferal-EPO-PET/MRI in combination with Gaussian Mixture Modeling enables unsupervised lesions identification
European Molecular Imaging Meeting, 2016 (poster)
ei
Ramirez-Villegas, J. F., Logothetis, N. K., Besserve, M.
Statistical source separation of rhythmic LFP patterns during sharp wave ripples in the macaque hippocampus
47th Annual Meeting of the Society for Neuroscience (Neuroscience), 2016 (poster)
ei
Besserve, M., Logothetis, N. K.
Hippocampal neural events predict ongoing brain-wide BOLD activity
47th Annual Meeting of the Society for Neuroscience (Neuroscience), 2016 (poster)
2015
ei
Ramirez-Villegas, J. F., Logothetis, N. K., Besserve, M.
Diversity of sharp wave-ripples in the CA1 of the macaque hippocampus and their brain wide signatures
45th Annual Meeting of the Society for Neuroscience (Neuroscience 2015), October 2015 (poster)
ei
Loktyushin, A., Babayeva, M., Gallichan, D., Krueger, G., Scheffler, K., Kober, T.
Retrospective rigid motion correction of undersampled MRI data
23rd Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine, ISMRM, June 2015 (poster)
ei
Feng, X., Loktyushin, A., Deistung, A., Reichenbach, J. R.
Improving Quantitative Susceptibility and R2* Mapping by Applying Retrospective Motion Correction
23rd Annual Meeting and Exhibition of the International Society for Magnetic Resonance in Medicine, ISMRM, June 2015 (poster)
ei
Foreman-Mackey, D., Hogg, D., Schölkopf, B., Wang, D.
Increasing the sensitivity of Kepler to Earth-like exoplanets
Workshop: 225th American Astronomical Society Meeting 2015 , pages: 105.01D, 2015 (poster)
ei
Wang, D., Foreman-Mackey, D., Hogg, D., Schölkopf, B.
Calibrating the pixel-level Kepler imaging data with a causal data-driven model
Workshop: 225th American Astronomical Society Meeting 2015 , pages: 258.08, 2015 (poster)
ei
Katiyar, P., Divine, M. R., Pichler, B. J., Disselhorst, J. A.
Assessment of tumor heterogeneity using unsupervised graph based clustering of multi-modality imaging data
European Molecular Imaging Meeting, 2015 (poster)
ei
Katiyar, P., Divine, M. R., Pichler, B. J., Disselhorst, J. A.
Novel segmentation of dynamic [18]F-FDG PET bypasses the need of arterial plasma input function, delivering a robust quantification of the tumor microenvironment
World Molecular Imaging Conference, 2015 (poster)
ei
Köhler, R., Schölkopf, B., Hirsch, M.
Disparity estimation from a generative light field model
IEEE International Conference on Computer Vision (ICCV 2015), Workshop on Inverse Rendering, 2015, Note: This work has been presented as a poster and is not included in the workshop proceedings. (poster)

2014
ps
Nowozin, S., Gehler, P. V., Jancsary, J., Lampert, C. H.
Advanced Structured Prediction
Advanced Structured Prediction, pages: 432, Neural Information Processing Series, MIT Press, November 2014 (book)
ei
Kober, J., Peters, J.
Learning Motor Skills: From Algorithms to Robot Experiments
97, pages: 191, Springer Tracts in Advanced Robotics, Springer, 2014 (book)
ei
Ramirez-Villegas, J. F., Logothetis, N. K., Besserve, M.
Dynamical source analysis of hippocampal sharp-wave ripple episodes
Bernstein Conference, 2014 (poster)
ei
Schultz, T., Nedjati-Gilani, G., Venkataraman, A., O’Donnell, L., Panagiotaki, E.
Computational Diffusion MRI and Brain Connectivity
pages: 255, Mathematics and Visualization, Springer, 2014 (book)
ei
Babayeva, M., Loktyushin, A., Kober, T., Granziera, C., Nickisch, H., Gruetter, R., Krueger, G.
FID-guided retrospective motion correction based on autofocusing
Joint Annual Meeting ISMRM-ESMRMB, Milano, Italy, 2014 (poster)
ei
Ramirez-Villegas, J. F., Logothetis, N. K., Besserve, M.
Cluster analysis of sharp-wave ripple field potential signatures in the macaque hippocampus
Computational and Systems Neuroscience Meeting (COSYNE), 2014 (poster)
ei
Katiyar, P., Divine, M. R., Pichler, B. J., Disselhorst, J. A.
oxel level [18]F-FDG PET/MRI unsupervised segmentation of the tumor microenvironment
World Molecular Imaging Conference, 2014 (poster)

ps
Pons-Moll, G.
Human Pose Estimation from Video and Inertial Sensors
Ph.D Thesis, -, 2014 (book)
2013
ei
Safavi, S., Panagiotaropoulos, T., Kapoor, V., Logothetis, N., Besserve, M.
Coupling between spiking activity and beta band spatio-temporal patterns in the macaque PFC
43rd Annual Meeting of the Society for Neuroscience (Neuroscience), 2013 (poster)
ei
Lopez-Paz, D., Hernandez-Lobato, J., Ghahramani, Z.
Gaussian Process Vine Copulas for Multivariate Dependence
International Conference on Machine Learning (ICML), 2013 (poster)