Understanding High-Level Semantics by Modeling Traffic Patterns
2013
Conference Paper
avg
ps
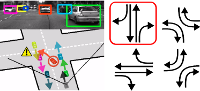
In this paper, we are interested in understanding the semantics of outdoor scenes in the context of autonomous driving. Towards this goal, we propose a generative model of 3D urban scenes which is able to reason not only about the geometry and objects present in the scene, but also about the high-level semantics in the form of traffic patterns. We found that a small number of patterns is sufficient to model the vast majority of traffic scenes and show how these patterns can be learned. As evidenced by our experiments, this high-level reasoning significantly improves the overall scene estimation as well as the vehicle-to-lane association when compared to state-of-the-art approaches. All data and code will be made available upon publication.
| Author(s): | Hongyi Zhang and Andreas Geiger and Raquel Urtasun |
| Book Title: | International Conference on Computer Vision |
| Pages: | 3056-3063 |
| Year: | 2013 |
| Month: | December |
| Department(s): | Autonomous Vision, Perceiving Systems |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| Address: | Sydney, Australia |
| Links: |
pdf
|
|
BibTex @inproceedings{Zhang2013ICCV,
title = {Understanding High-Level Semantics by Modeling Traffic Patterns},
author = {Zhang, Hongyi and Geiger, Andreas and Urtasun, Raquel},
booktitle = {International Conference on Computer Vision},
pages = {3056-3063},
address = {Sydney, Australia},
month = dec,
year = {2013},
doi = {},
month_numeric = {12}
}
|
|