Occupancy Flow: 4D Reconstruction by Learning Particle Dynamics
2019
Conference Paper
avg
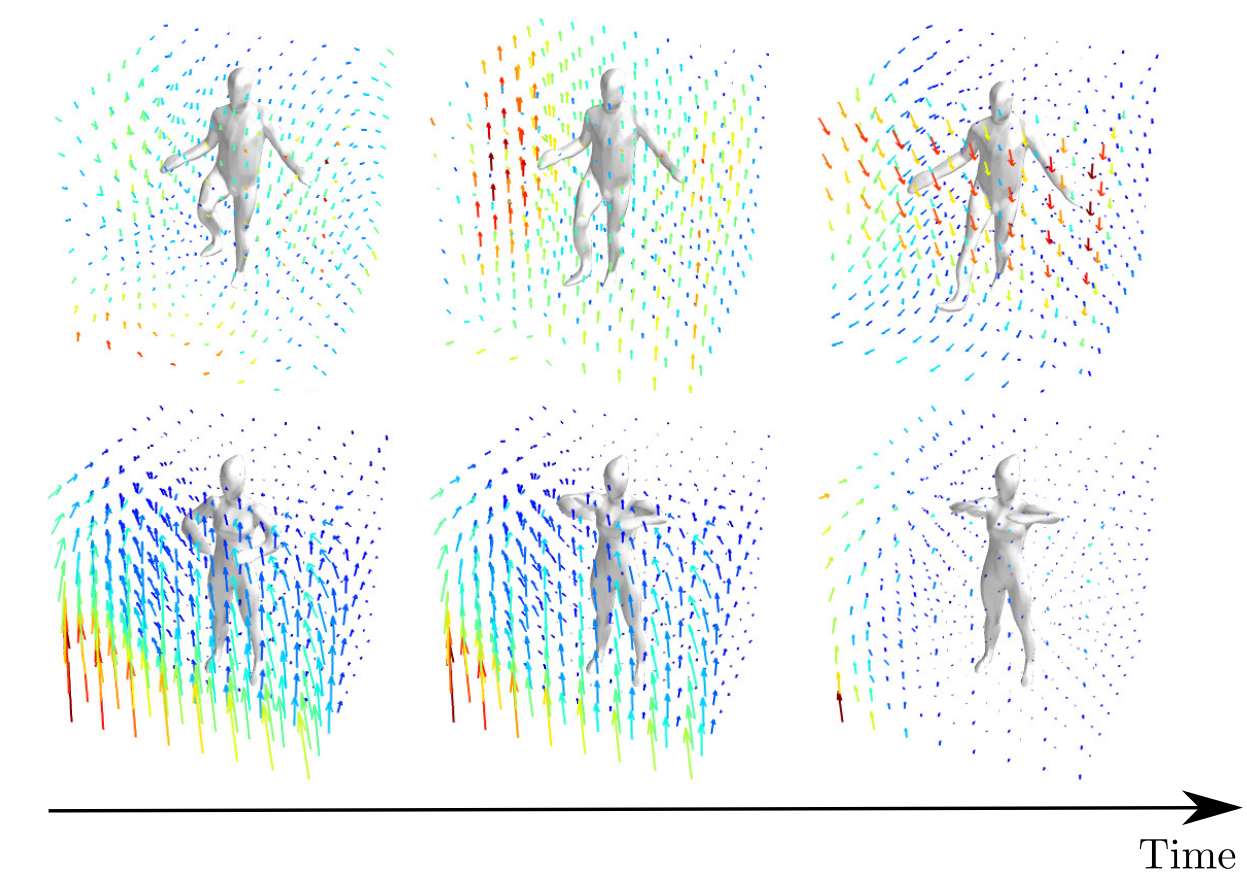
Deep learning based 3D reconstruction techniques have recently achieved impressive results. However, while state-of-the-art methods are able to output complex 3D geometry, it is not clear how to extend these results to time-varying topologies. Approaches treating each time step individually lack continuity and exhibit slow inference, while traditional 4D reconstruction methods often utilize a template model or discretize the 4D space at fixed resolution. In this work, we present Occupancy Flow, a novel spatio-temporal representation of time-varying 3D geometry with implicit correspondences. Towards this goal, we learn a temporally and spatially continuous vector field which assigns a motion vector to every point in space and time. In order to perform dense 4D reconstruction from images or sparse point clouds, we combine our method with a continuous 3D representation. Implicitly, our model yields correspondences over time, thus enabling fast inference while providing a sound physical description of the temporal dynamics. We show that our method can be used for interpolation and reconstruction tasks, and demonstrate the accuracy of the learned correspondences. We believe that Occupancy Flow is a promising new 4D representation which will be useful for a variety of spatio-temporal reconstruction tasks.
| Author(s): | Michael Niemeyer and Lars Mescheder and Michael Oechsle and Andreas Geiger |
| Book Title: | International Conference on Computer Vision |
| Year: | 2019 |
| Month: | October |
| Department(s): | Autonomous Vision |
| Bibtex Type: | Conference Paper (conference) |
| Event Place: | Seoul, South Korea |
| Links: |
pdf
poster suppmat code Project page video blog |
| Video: | |
|
BibTex @conference{Niemeyer2019ICCV,
title = {Occupancy Flow: 4D Reconstruction by Learning Particle Dynamics},
author = {Niemeyer, Michael and Mescheder, Lars and Oechsle, Michael and Geiger, Andreas},
booktitle = {International Conference on Computer Vision},
month = oct,
year = {2019},
doi = {},
month_numeric = {10}
}
|
|