Capturing and Inferring Dense Full-Body Human-Scene Contact
2022
Conference Paper
OS Lab
ps
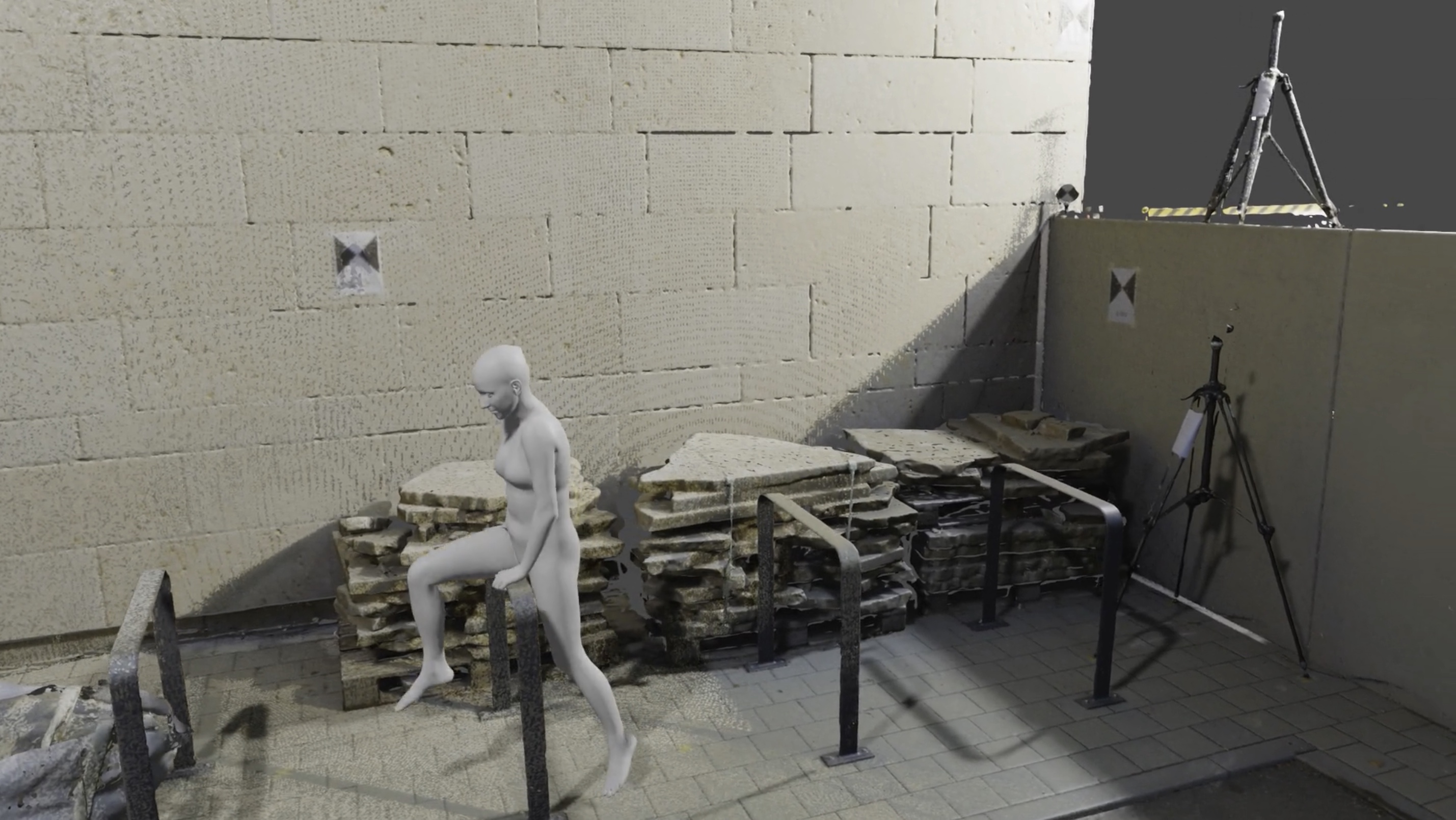
Inferring human-scene contact (HSC) is the first step toward understanding how humans interact with their surroundings. While detecting 2D human-object interaction (HOI) and reconstructing 3D human pose and shape (HPS) have enjoyed significant progress, reasoning about 3D human-scene contact from a single image is still challenging. Existing HSC detection methods consider only a few types of predefined contact, often reduce body and scene to a small number of primitives, and even overlook image evidence. To predict human-scene contact from a single image, we address the limitations above from both data and algorithmic perspectives. We capture a new dataset called RICH for “Real scenes, Interaction, Contact and Humans.” RICH contains multiview outdoor/indoor video sequences at 4K resolution, ground-truth 3D human bodies captured using markerless motion capture, 3D body scans, and high resolution 3D scene scans. A key feature of RICH is that it also contains accurate vertex-level contact labels on the body. Using RICH, we train a network that predicts dense body-scene contacts from a single RGB image. Our key insight is that regions in contact are always occluded so the network needs the ability to explore the whole image for evidence. We use a transformer to learn such non-local relationships and propose a new Body-Scene contact TRansfOrmer (BSTRO). Very few methods explore 3D contact; those that do focus on the feet only, detect foot contact as a post-processing step, or infer contact from body pose without looking at the scene. To our knowledge, BSTRO is the first method to directly estimate 3D body-scene contact from a single image. We demonstrate that BSTRO significantly outperforms the prior art. The code and dataset are available at https://rich.is.tue.mpg.de.
| Author(s): | Chun-Hao P. Huang and Hongwei Yi and Markus Höschle and Matvey Safroshkin and Tsvetelina Alexiadis and Senya Polikovsky and Daniel Scharstein and Michael J. Black |
| Book Title: | 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2022) |
| Pages: | 13264--13275 |
| Year: | 2022 |
| Month: | June |
| Publisher: | IEEE |
| Department(s): | Optics and Sensing Laboratory, Perceiving Systems |
| Research Project(s): |
Capturing Contact
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/CVPR52688.2022.01292 |
| Event Name: | IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2022) |
| Event Place: | New Orleans, Louisiana |
| Address: | Piscataway, NJ |
| ISBN: | 978-1-6654-6947-0 |
| State: | Published |
| Links: |
project
arXiv BSTRO code video |
| Video: | |
|
BibTex @inproceedings{huang2022rich,
title = {Capturing and Inferring Dense Full-Body Human-Scene Contact},
author = {Huang, Chun-Hao P. and Yi, Hongwei and H{\"o}schle, Markus and Safroshkin, Matvey and Alexiadis, Tsvetelina and Polikovsky, Senya and Scharstein, Daniel and Black, Michael J.},
booktitle = {2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2022)},
pages = {13264--13275},
publisher = {IEEE},
address = {Piscataway, NJ},
month = jun,
year = {2022},
doi = {10.1109/CVPR52688.2022.01292},
month_numeric = {6}
}
|
|