A Fabric-Based Sensing System for Recognizing Social Touch
2020
Miscellaneous
hi
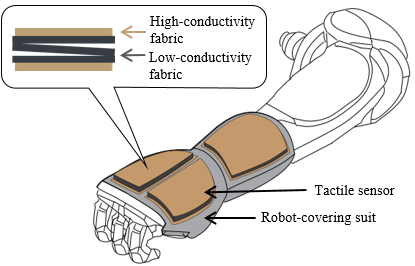
We present a fabric-based piezoresistive tactile sensor system designed to detect social touch gestures on a robot. The unique sensor design utilizes three layers of low-conductivity fabric sewn together on alternating edges to form an accordion pattern and secured between two outer high-conductivity layers. This five-layer design demonstrates a greater resistance range and better low-force sensitivity than previous designs that use one layer of low-conductivity fabric with or without a plastic mesh layer. An individual sensor from our system can presently identify six different communication gestures – squeezing, patting, scratching, poking, hand resting without movement, and no touch – with an average accuracy of 90%. A layer of foam can be added beneath the sensor to make a rigid robot more appealing for humans to touch without inhibiting the system’s ability to register social touch gestures.
| Author(s): | Rachael Bevill Burns and Hyosang Lee and Hasti Seifi and Katherine J. Kuchenbecker |
| Year: | 2020 |
| Month: | March |
| Department(s): | Haptic Intelligence |
| Research Project(s): | |
| Bibtex Type: | Miscellaneous (misc) |
| How Published: | Work-in-progress paper (3 pages) presented at the IEEE Haptics Symposium |
| State: | Published |
|
BibTex @misc{Burns20-HSWIP-Recognizing,
title = {A Fabric-Based Sensing System for Recognizing Social Touch},
author = {Burns, Rachael Bevill and Lee, Hyosang and Seifi, Hasti and Kuchenbecker, Katherine J.},
howpublished = {Work-in-progress paper (3 pages) presented at the IEEE Haptics Symposium},
month = mar,
year = {2020},
doi = {},
month_numeric = {3}
}
|
|