An Online Scalable Approach to Unified Multirobot Cooperative Localization and Object Tracking
2017
Article
ps
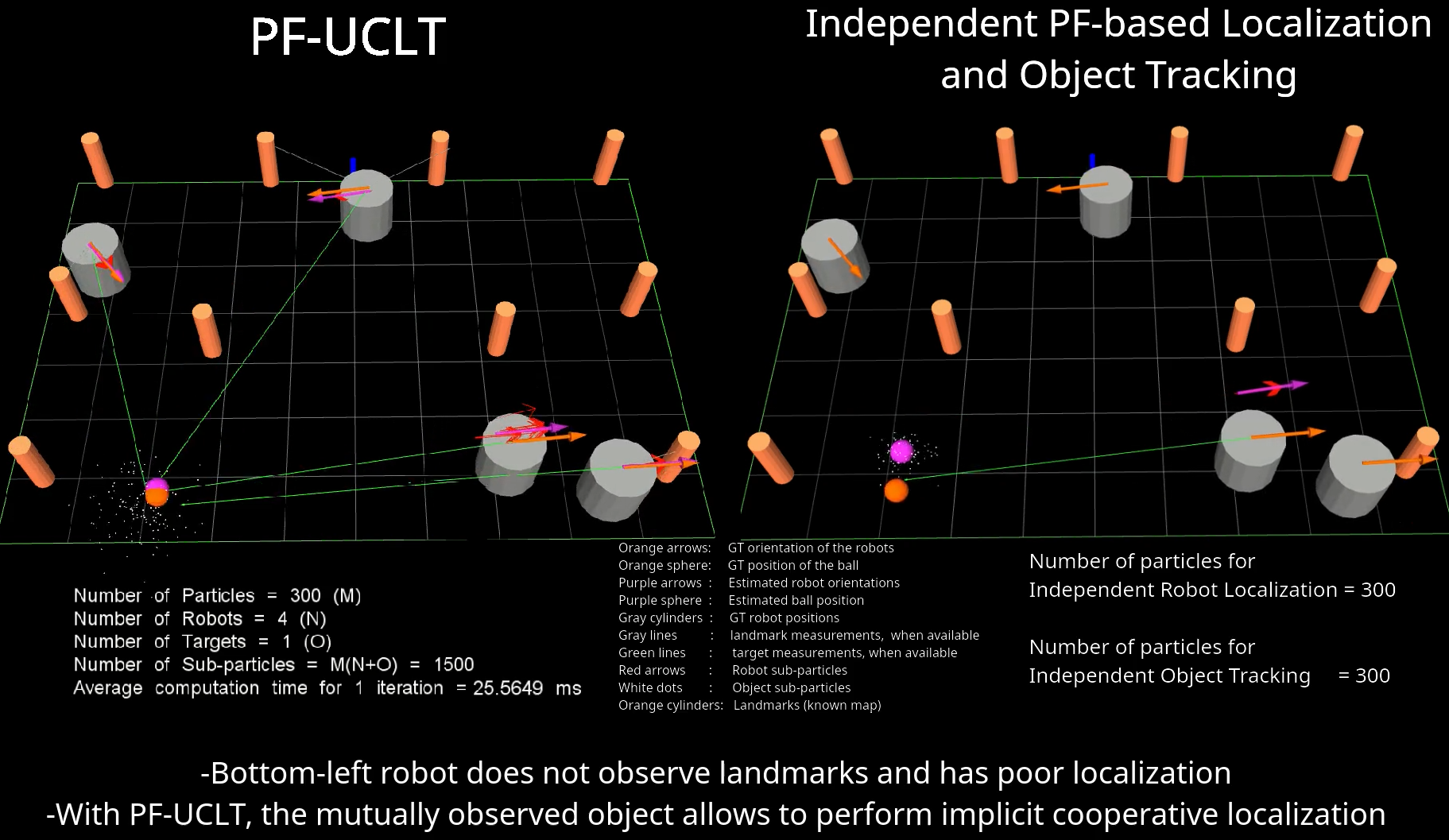
In this article we present a unified approach for multi-robot cooperative simultaneous localization and object tracking based on particle filters. Our approach is scalable with respect to the number of robots in the team. We introduce a method that reduces, from an exponential to a linear growth, the space and computation time requirements with respect to the number of robots in order to maintain a given level of accuracy in the full state estimation. Our method requires no increase in the number of particles with respect to the number of robots. However, in our method each particle represents a full state hypothesis, leading to the linear dependency on the number of robots of both space and time complexity. The derivation of the algorithm implementing our approach from a standard particle filter algorithm and its complexity analysis are presented. Through an extensive set of simulation experiments on a large number of randomized datasets, we demonstrate the correctness and efficacy of our approach. Through real robot experiments on a standardized open dataset of a team of four soccer playing robots tracking a ball, we evaluate our method's estimation accuracy with respect to the ground truth values. Through comparisons with other methods based on i) nonlinear least squares minimization and ii) joint extended Kalman filter, we further highlight our method's advantages. Finally, we also present a robustness test for our approach by evaluating it under scenarios of communication and vision failure in teammate robots.
| Author(s): | Aamir Ahmad and Guilherme Lawless and Pedro Lima |
| Journal: | IEEE Transactions on Robotics (T-RO) |
| Volume: | 33 |
| Pages: | 1184 - 1199 |
| Year: | 2017 |
| Month: | October |
| Department(s): | Perceiving Systems |
| Research Project(s): | |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1109/TRO.2017.2715342 |
| State: | Published |
| URL: | http://ieeexplore.ieee.org/document/7964712/ |
| Additional (custom) Fields: | |
| comments: | Also published in the proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018, Journal Track. |
| Attachments: |
Published Version
|
|
BibTex @article{aahmad_tro_17,
title = {An Online Scalable Approach to Unified Multirobot Cooperative Localization and Object Tracking},
author = {Ahmad, Aamir and Lawless, Guilherme and Lima, Pedro},
journal = {IEEE Transactions on Robotics (T-RO)},
volume = {33},
pages = {1184 - 1199},
month = oct,
year = {2017},
doi = {10.1109/TRO.2017.2715342},
url = {http://ieeexplore.ieee.org/document/7964712/},
month_numeric = {10}
}
|
|