Unsupervised Odometry and Depth Learning for Endoscopic Capsule Robots
2018
Article
pi
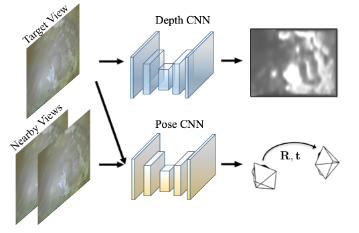
In the last decade, many medical companies and research groups have tried to convert passive capsule endoscopes as an emerging and minimally invasive diagnostic technology into actively steerable endoscopic capsule robots which will provide more intuitive disease detection, targeted drug delivery and biopsy-like operations in the gastrointestinal(GI) tract. In this study, we introduce a fully unsupervised, real-time odometry and depth learner for monocular endoscopic capsule robots. We establish the supervision by warping view sequences and assigning the re-projection minimization to the loss function, which we adopt in multi-view pose estimation and single-view depth estimation network. Detailed quantitative and qualitative analyses of the proposed framework performed on non-rigidly deformable ex-vivo porcine stomach datasets proves the effectiveness of the method in terms of motion estimation and depth recovery.
| Author(s): | Mehmet Turan and Evin Pinar Ornek and Nail Ibrahimli and Can Giracoglu and Yasin Almalioglu and Mehmet Fatih Yanik and Metin Sitti |
| Journal: | ArXiv e-prints |
| Year: | 2018 |
| Month: | March |
| Day: | 2 |
| Department(s): | Physical Intelligence |
| Bibtex Type: | Article (article) |
| Eprint: | 1803.01047 |
| URL: | https://arxiv.org/abs/1803.01047 |
|
BibTex @article{2018arXiv180301047T,
title = {Unsupervised Odometry and Depth Learning for Endoscopic Capsule Robots},
author = {Turan, Mehmet and Ornek, Evin Pinar and Ibrahimli, Nail and Giracoglu, Can and Almalioglu, Yasin and Yanik, Mehmet Fatih and Sitti, Metin},
journal = {ArXiv e-prints},
month = mar,
year = {2018},
doi = {},
eprint = {1803.01047},
url = {https://arxiv.org/abs/1803.01047},
month_numeric = {3}
}
|
|