
2024
hi
Serhat, G., Kuchenbecker, K. J.
Fingertip Dynamic Response Simulated Across Excitation Points and Frequencies
Biomechanics and Modeling in Mechanobiology, April 2024 (article) Accepted

hi
Schulz, A.
Being Neurodivergent in Academia: Autistic and abroad
eLife, 13, March 2024 (article)
hi
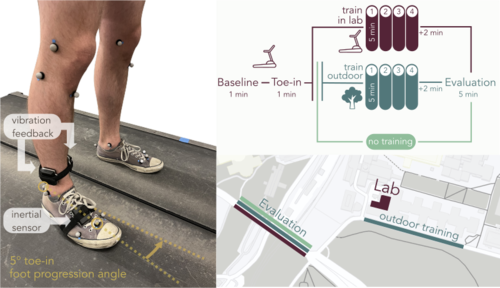
Rokhmanova, N., Pearl, O., Kuchenbecker, K. J., Halilaj, E.
IMU-Based Kinematics Estimation Accuracy Affects Gait Retraining Using Vibrotactile Cues
IEEE Transactions on Neural Systems and Rehabilitation Engineering, 32, pages: 1005-1012, February 2024 (article)

hi
Fitter, N. T., Mohan, M., Preston, R. C., Johnson, M. J., Kuchenbecker, K. J.
How Should Robots Exercise with People? Robot-Mediated Exergames Win with Music, Social Analogues, and Gameplay Clarity
Frontiers in Robotics and AI, 10(1155837):1-18, January 2024 (article)
hi
Khojasteh, B., Shao, Y., Kuchenbecker, K. J.
Robust Surface Recognition with the Maximum Mean Discrepancy: Degrading Haptic-Auditory Signals through Bandwidth and Noise
IEEE Transactions on Haptics, 17(1):58-65, January 2024, Presented at the IEEE Haptics Symposium (article)
zwe-csfm
Gorke, O., Stuhlmüller, M., Tovar, G. E. M., Southan, A.
Unravelling parameter interactions in calcium alginate/polyacrylamide double network hydrogels using a design of experiments approach for the optimization of mechanical properties
Materials Advances, 5, pages: 2851-2859, Royal Society of Chemistry, 2024 (article)
ps
Huang, Y., Taheri, O., Black, M. J., Tzionas, D.
InterCap: Joint Markerless 3D Tracking of Humans and Objects in Interaction from Multi-view RGB-D Images
International Journal of Computer Vision (IJCV), 2024 (article)
al
Simon, A., Weimar, J., Martius, G., Oettel, M.
Machine learning of a density functional for anisotropic patchy particles
Journal of Chemical Theory and Computation, 2024 (article)
zwe-csfm
Grübel, J., Wendlandt, T., Urban, D., Jauch, C. O., Wege, C., Tovar, G. E. M., Southan, A.
Soft Sub-Structured Multi-Material Biosensor Hydrogels with Enzymes Retained by Plant Viral Scaffolds
Macromolecular Bioscience, 24(3):2300311, Wiley, 2024 (article)
ev
Xue, Y., Li, H., Leutenegger, S., Stueckler, J.
Event-based Non-Rigid Reconstruction of Low-Rank Parametrized Deformations from Contours
International Journal of Computer Vision (IJCV), 2024 (article)
ei
Tsirtsis, S., Tabibian, B., Khajehnejad, M., Singla, A., Schölkopf, B., Gomez-Rodriguez, M.
Optimal Decision Making Under Strategic Behavior
Management Science, 2024, Published Online (article) In press
ps
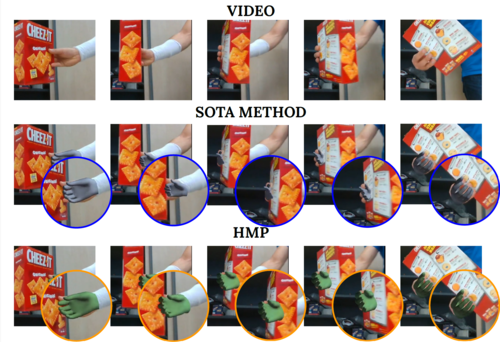
Duran, E., Kocabas, M., Choutas, V., Fan, Z., Black, M. J.
HMP: Hand Motion Priors for Pose and Shape Estimation from Video
Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2024 (article)
2023
pio
Ruggeri, N., Lonardi, A., De Bacco, C.
Message-Passing on Hypergraphs: Detectability, Phase Transitions and Higher-Order Information
December 2023 (article)
ps
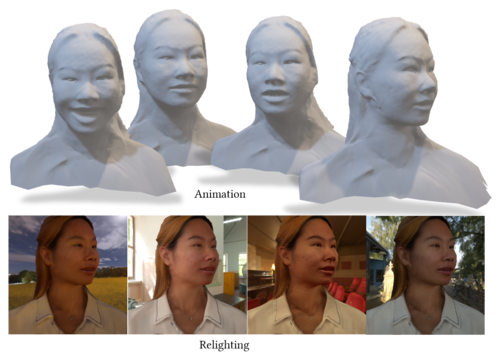
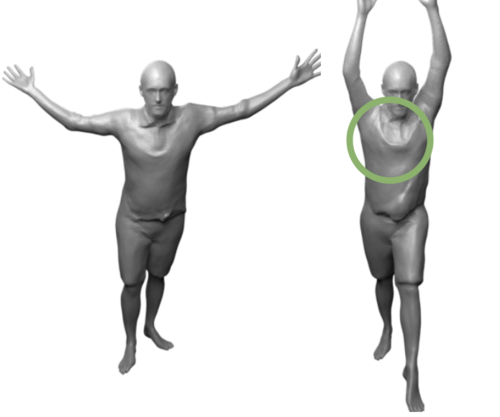
Bharadwaj, S., Zheng, Y., Hilliges, O., Black, M. J., Abrevaya, V. F.
FLARE: Fast learning of Animatable and Relightable Mesh Avatars
ACM Transactions on Graphics, 42(6):204:1-204:15, December 2023 (article) Accepted
ps
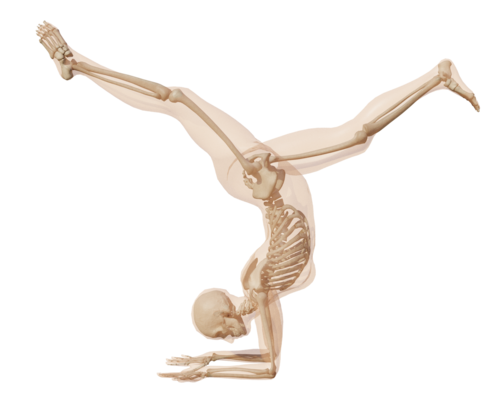
Keller, M., Werling, K., Shin, S., Delp, S., Pujades, S., Liu, C. K., Black, M. J.
From Skin to Skeleton: Towards Biomechanically Accurate 3D Digital Humans
ACM Transaction on Graphics (ToG), 42(6):253:1-253:15, December 2023 (article)
hi
L’Orsa, R., Lama, S., Westwick, D., Sutherland, G., Kuchenbecker, K. J.
Towards Semi-Automated Pleural Cavity Access for Pneumothorax in Austere Environments
Acta Astronautica, 212, pages: 48-53, November 2023 (article)
pio
Badalyan, A., Ruggeri, N., De Bacco, C.
Hypergraphs with node attributes: structure and inference
November 2023 (article) Submitted
rm
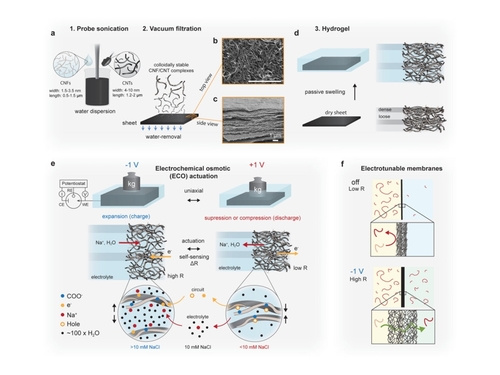
Benselfelt, T., Shakya, J., Rothemund, P., Lindström, S. B., Piper, A., Winkler, T. E., Hajian, A., Wågberg, L., Keplinger, C., Hamedi, M. M.
Electrochemically Controlled Hydrogels with Electrotunable Permeability and Uniaxial Actuation
Advanced Materials, 35(45):2303255, Wiley-VCH GmbH, November 2023 (article)
ei
Hupkes, D., Giulianelli, M., Dankers, V., Artetxe, M., Elazar, Y., Pimentel, T., Christodoulopoulos, C., Lasri, K., Saphra, N., Sinclair, A., Ulmer, D., Schottmann, F., Batsuren, K., Sun, K., Sinha, K., Khalatbari, L., Ryskina, M., Frieske, R., Cotterell, R., Jin, Z.
A taxonomy and review of generalization research in NLP
Nature Machine Intelligence, 5(10):1161-1174, October 2023 (article)
pio
Ibrahim, A. A., Muehlebach, M., De Bacco, C.
Optimal transport with constraints: from mirror descent to classical mechanics
September 2023 (article) Submitted
hi
Khojasteh, B., Solowjow, F., Trimpe, S., Kuchenbecker, K. J.
Multimodal Multi-User Surface Recognition with the Kernel Two-Sample Test
IEEE Transactions on Automation Science and Engineering, pages: 1-16, August 2023 (article)
ei
Hawkins-Hooker, A., Visonà, G., Narendra, T., Rojas-Carulla, M., Schölkopf, B., Schweikert, G.
Getting personal with epigenetics: towards individual-specific epigenomic imputation with machine learning
Nature Communications, 14(1), August 2023 (article)
pio
Della Vecchia, A., Neocosmos, K., Larremore, D. B., Moore, C., De Bacco, C.
A model for efficient dynamical ranking in networks
August 2023 (article) Submitted
al
hi
Andrussow, I., Sun, H., Kuchenbecker, K. J., Martius, G.
Minsight: A Fingertip-Sized Vision-Based Tactile Sensor for Robotic Manipulation
Advanced Intelligent Systems, 5(8):2300042, August 2023, Inside back cover (article)
hi
Lee, Y., Husin, H. M., Forte, M., Lee, S., Kuchenbecker, K. J.
Learning to Estimate Palpation Forces in Robotic Surgery From Visual-Inertial Data
IEEE Transactions on Medical Robotics and Bionics, 5(3):496-506, August 2023 (article)

ps
Rueegg, N., Zuffi, S., Schindler, K., Black, M. J.
BARC: Breed-Augmented Regression Using Classification for 3D Dog Reconstruction from Images
Int. J. of Comp. Vis. (IJCV), 131(8):1964–1979, August 2023 (article)
ei
Ortiz-Jimenez*, G., de Jorge*, P., Sanyal, A., Bibi, A., Dokania, P. K., Frossard, P., Rogez, G., Torr, P.
Catastrophic overfitting can be induced with discriminative non-robust features
Transactions on Machine Learning Research , July 2023, *equal contribution (article)
pio
Lonardi, A., De Bacco, C.
Bilevel Optimization for Traffic Mitigation in Optimal Transport Networks
Physical Review Letter, July 2023 (article) Accepted
rm
Johnson, B. K., Naris, M., Sundaram, V., Volchko, A., Ly, K., Mitchell, S. K., Acome, E., Kellaris, N., Keplinger, C., Correll, N., Humbert, J. S., Rentschler, M. E.
A Multifunctional Soft Robotic Shape Display with High-speed Actuation, Sensing, and Control
Nature Communications, 14(1), July 2023 (article)
pi
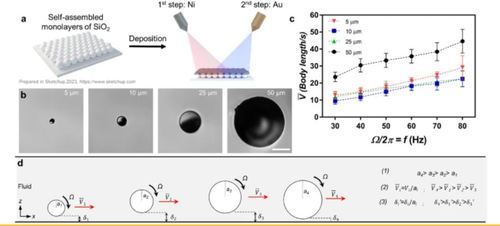
Bozuyuk, U., Han, M., Sitti, M.
Swarming magnetic surface microrollers enable directed locomotion in circular confinements
Research Square, July 2023 (article)
ei
Kekić, A., Dehning, J., Gresele, L., von Kügelgen, J., Priesemann, V., Schölkopf, B.
Evaluating vaccine allocation strategies using simulation-assisted causal modeling
Patterns, 4(6), June 2023 (article)
pi
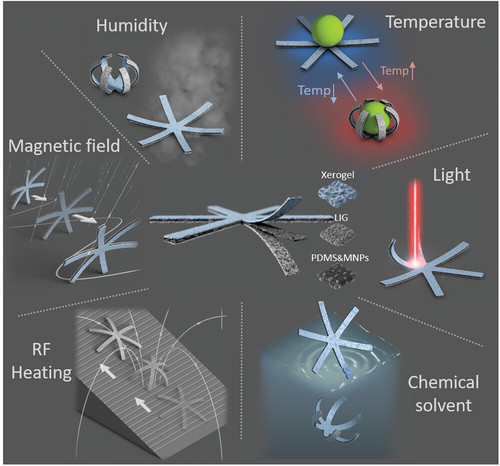
Zheng, Z., Han, J., Demir, S. O., Wang, H., Jiang, W., Liu, H., Sitti, M.
Electrodeposited Superhydrophilic-Superhydrophobic Composites for Untethered Multi-Stimuli-Responsive Soft Millirobots
Advanced Science, pages: 2302409, June 2023 (article)
pi
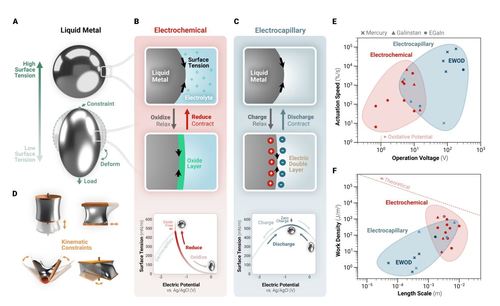
Liao, J., Majidi, C., Sitti, M.
Liquid Metal Actuators: A Comparative Analysis of Surface Tension Controlled Actuation
Advanced Materials (Deerfield Beach, Fla.), pages: e2300560-e2300560, June 2023 (article)
pio
Ruggeri, N., Contisciani, M., Battiston, F., De Bacco, C.
Community Detection in Large Hypergraphs
Science Advances, 9, eadg9159, June 2023 (article)
pi
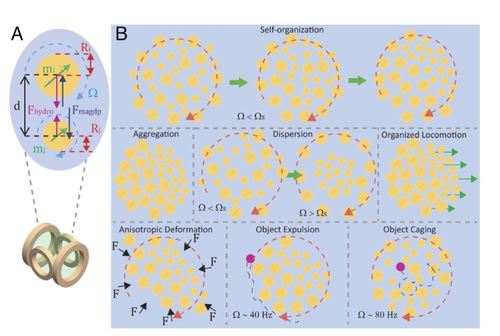
Ceron, S., Gardi, G., Petersen, K., Sitti, M.
Programmable self-organization of heterogeneous microrobot collectives
Proceedings of the National Academy of Sciences, 120(24):e2221913120, June 2023 (article)
ei
Katiyar, P., Schwenck, J., Frauenfeld, L., Divine, M. R., Agrawal, V., Kohlhofer, U., Gatidis, S., Kontermann, R., Königsrainer, A., Quintanilla-Martinez, L., la Fougère, C., Schölkopf, B., Pichler, B. J., Disselhorst, J. A.
Quantification of intratumoural heterogeneity in mice and patients via machine-learning models trained on PET–MRI data
Nature Biomedical Engineering, 7(8):1014-1027, June 2023 (article)
pi
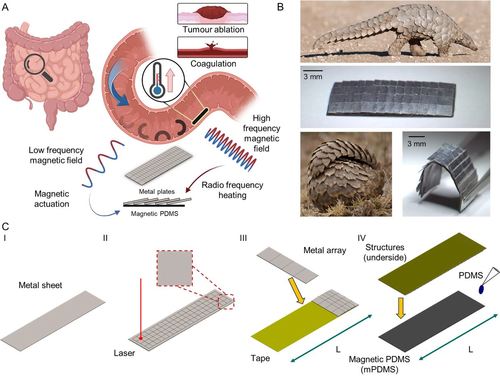
Soon, R. H., Yin, Z., Dogan, M. A., Dogan, N. O., Tiryaki, M. E., Karacakol, A. C., Aydin, A., Esmaeili-Dokht, P., Sitti, M.
Pangolin-inspired untethered magnetic robot for on-demand biomedical heating applications
Nature Communications, 14(1):3320, June 2023 (article)

hi
Gertler, I., Serhat, G., Kuchenbecker, K. J.
Generating Clear Vibrotactile Cues with a Magnet Embedded in a Soft Finger Sheath
Soft Robotics, 10(3):624-635, June 2023 (article)

ps
Behrens, S. C., Tesch, J., Sun, P. J., Starke, S., Black, M. J., Schneider, H., Pruccoli, J., Zipfel, S., Giel, K. E.
Virtual Reality Exposure to a Healthy Weight Body Is a Promising Adjunct Treatment for Anorexia Nervosa
Psychotherapy and Psychosomatics, 92(3):170-179, June 2023 (article)
hi
Block, A. E., Seifi, H., Hilliges, O., Gassert, R., Kuchenbecker, K. J.
In the Arms of a Robot: Designing Autonomous Hugging Robots with Intra-Hug Gestures
ACM Transactions on Human-Robot Interaction, 12(2):1-49, June 2023, Special Issue on Designing the Robot Body: Critical Perspectives on Affective Embodied Interaction (article)
pi
Bozuyuk, U., Ozturk, H., Sitti, M.
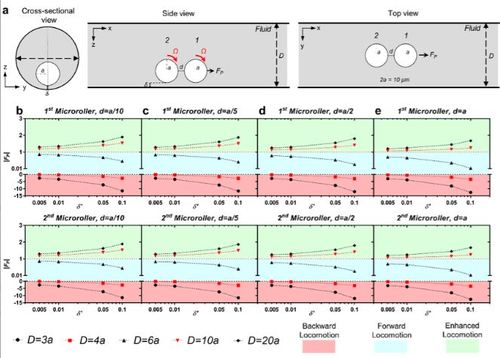
Microrobotic Locomotion in Blood Vessels: A Computational Study on the Performance of Surface Microrollers in the Cardiovascular System
Advanced Intelligent Systems, pages: 2300099, June 2023 (article)
pi
Bozuyuk, U., Ozturk, H., Sitti, M.
The mismatch between experimental and computational fluid dynamics analyses for magnetic surface microrollers
Scientific Reports, 13(1):10196, June 2023 (article)
pi
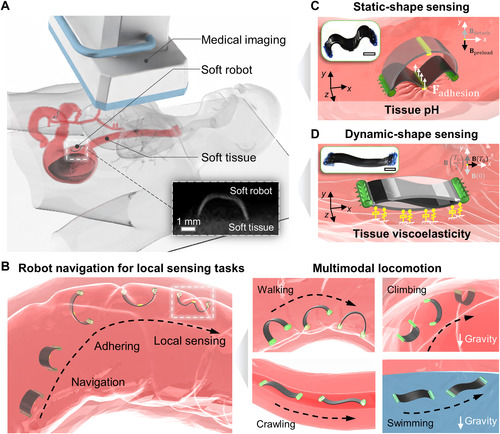
Wang, C., Wu, Y., Dong, X., Armacki, M., Sitti, M.
In situ sensing physiological properties of biological tissues using wireless miniature soft robots
Science advances, 9(23):eadg3988, June 2023 (article)
pio
Lotito, Q. F., Contisciani, M., De Bacco, C., Di Gaetano, L., Gallo, L., Montresor, A., Musciotto, F., Ruggeri, N., Battiston, F.
Hypergraphx: a library for higher-order network analysis
Journal of Complex Networks, 11, May 2023 (article)
ei
Gatidis, S., Kart, T., Fischer, M., Winzeck, S., Glocker, B., Bai, W., Bülow, R., Emmel, C., Friedrich, L., Kauczor, H., Keil, T., Kröncke, T., Mayer, P., Niendorf, T., Peters, A., Pischon, T., Schaarschmidt, B., Schmidt, B., Schulze, M., Umutle, L., Völzke, H., Küstner, T., Bamberg, F., Schölkopf, B., Rueckert, D.
Better Together: Data Harmonization and Cross-StudAnalysis of Abdominal MRI Data From UK Biobank and the German National Cohort
Investigative Radiology, 58(5):346-354, May 2023 (article)
ei
Mineeva*, O., Danciu*, D., Schölkopf, B., Ley, R. E., Rätsch, G., Youngblut, N. D.
ResMiCo: Increasing the quality of metagenome-assembled genomes with deep learning
PLOS Computational Biology, 19(5), Public Library of Science, May 2023, *equal contribution (article)
dlg
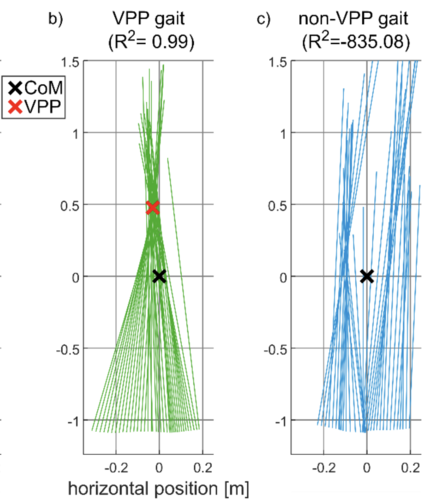
Schreff, L., Haeufle, D. F. B., Badri-Spröwitz, A., Vielemeyer, J., Müller, R.
Virtual pivot point in human walking: always experimentally observed but simulations suggest it may not be necessary for stability
Journal of Biomechanics, 153, May 2023 (article)
ps
Chen, X., Jiang, T., Song, J., Rietmann, M., Geiger, A., Black, M. J., Hilliges, O.
Fast-SNARF: A Fast Deformer for Articulated Neural Fields
IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), pages: 1-15, April 2023 (article)
ei
Safavi, S., Panagiotaropoulos, T. I., Kapoor, V., Ramirez-Villegas, J. F., Logothetis, N., Besserve, M.
Uncovering the Organization of Neural Circuits with Generalized Phase Locking Analysis
PLOS Computational Biology, 19(4):1-45, Public Library of Science, April 2023 (article)