Planning spin-walking locomotion for automatic grasping of microobjects by an untethered magnetic microgripper
2017
Conference Paper
pi
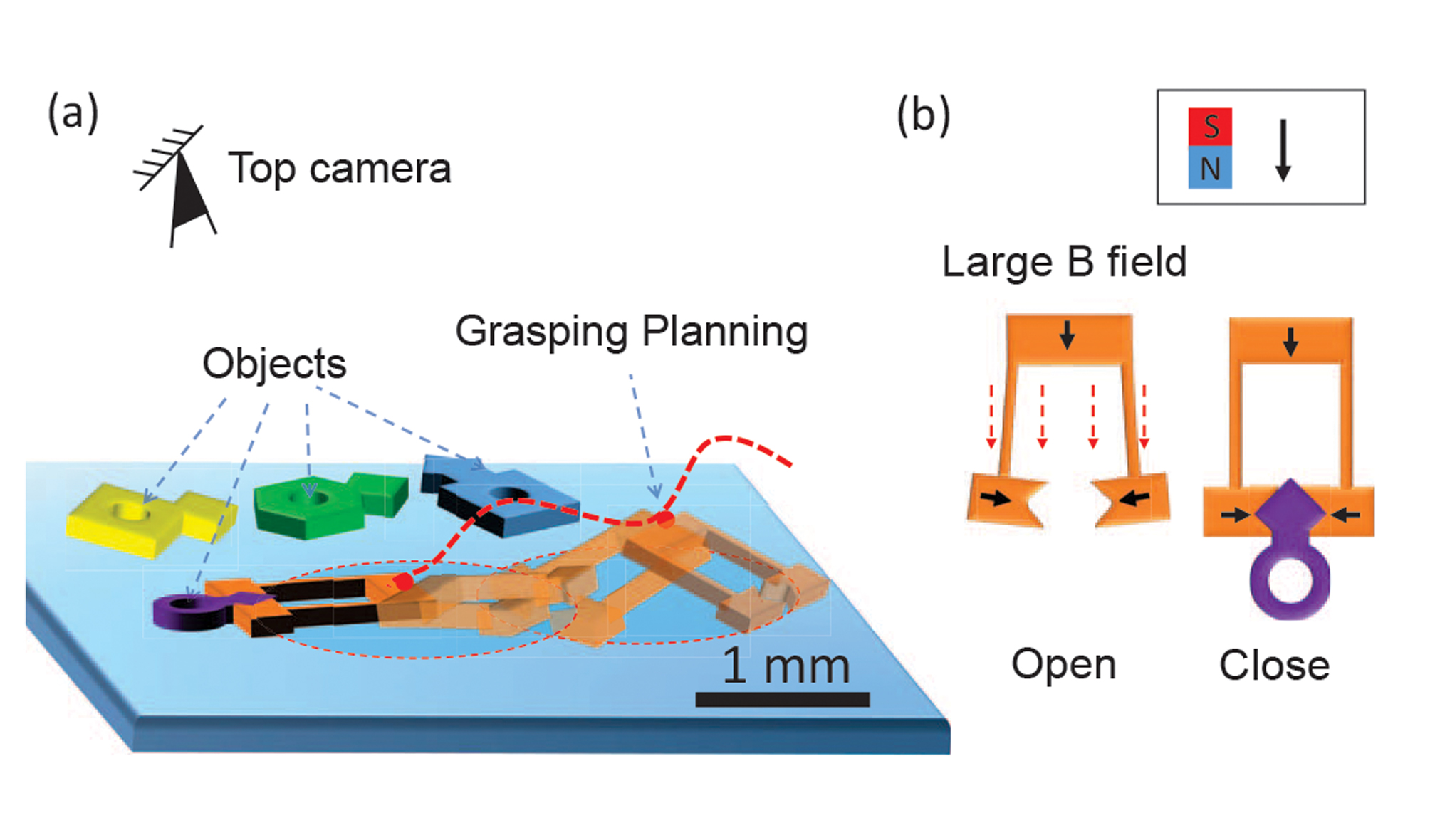
Most demonstrated mobile microrobot tasks so far have been achieved via pick-and-placing and dynamic trapping with teleoperation or simple path following algorithms. In our previous work, an untethered magnetic microgripper has been developed which has advanced functions, such as gripping objects. Both teleoperated manipulation in 2D and 3D have been demonstrated. However, it is challenging to control the magnetic microgripper to carry out manipulation tasks, because the grasping of objects so far in the literature relies heavily on teleoperation, which takes several minutes with even a skilled human expert. Here, we propose a new spin-walking locomotion and an automated 2D grasping motion planner for the microgripper, which enables time-efficient automatic grasping of microobjects that has not been achieved yet for untethered microrobots. In its locomotion, the microgripper repeatedly rotates about two principal axes to regulate its pose and move precisely on a surface. The motion planner could plan different motion primitives for grasping and compensate the uncertainties in the motion by learning the uncertainties and planning accordingly. We experimentally demonstrated that, using the proposed method, the microgripper could align to the target pose with error less than 0.1 body length and grip the objects within 40 seconds. Our method could significantly improve the time efficiency of micro-scale manipulation and have potential applications in microassembly and biomedical engineering.
| Author(s): | Dong, X. and Sitti, M. |
| Journal: | 2017 IEEE International Conference on Robotics and Automation (ICRA) |
| Pages: | 6612-6618 |
| Year: | 2017 |
| Department(s): | Physical Intelligence |
| Research Project(s): |
Mobile micromanipulation
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/ICRA.2017.7989782 |
|
BibTex @inproceedings{7989782,
title = {Planning spin-walking locomotion for automatic grasping of microobjects by an untethered magnetic microgripper},
author = {Dong, X. and Sitti, M.},
journal = {2017 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {6612-6618},
year = {2017},
doi = {10.1109/ICRA.2017.7989782}
}
|
|