








Unser Ziel ist es, die Prinzipien von Wahrnehmen, Lernen und Handeln in autonomen Systemen zu verstehen, die mit komplexen Umgebungen interagieren. Das Verständnis wollen wir nutzen, um künstliche intelligente Systeme zu entwickeln. Die Wissenschaftlerinnen und Wissenschaftler am Max-Planck-Institut für Intelligente Systeme erforschen diese Prinzipien in biologischen, hybriden und Computer-Systemen sowie in Materialien. Das Spektrum reicht dabei vom Nano- bis zum Makrobereich. Mit unserer stark interdisziplinären Herangehensweise kombinieren wir mathematische Modelle, Computer- und Materialwissenschaft sowie Biologie miteinander.



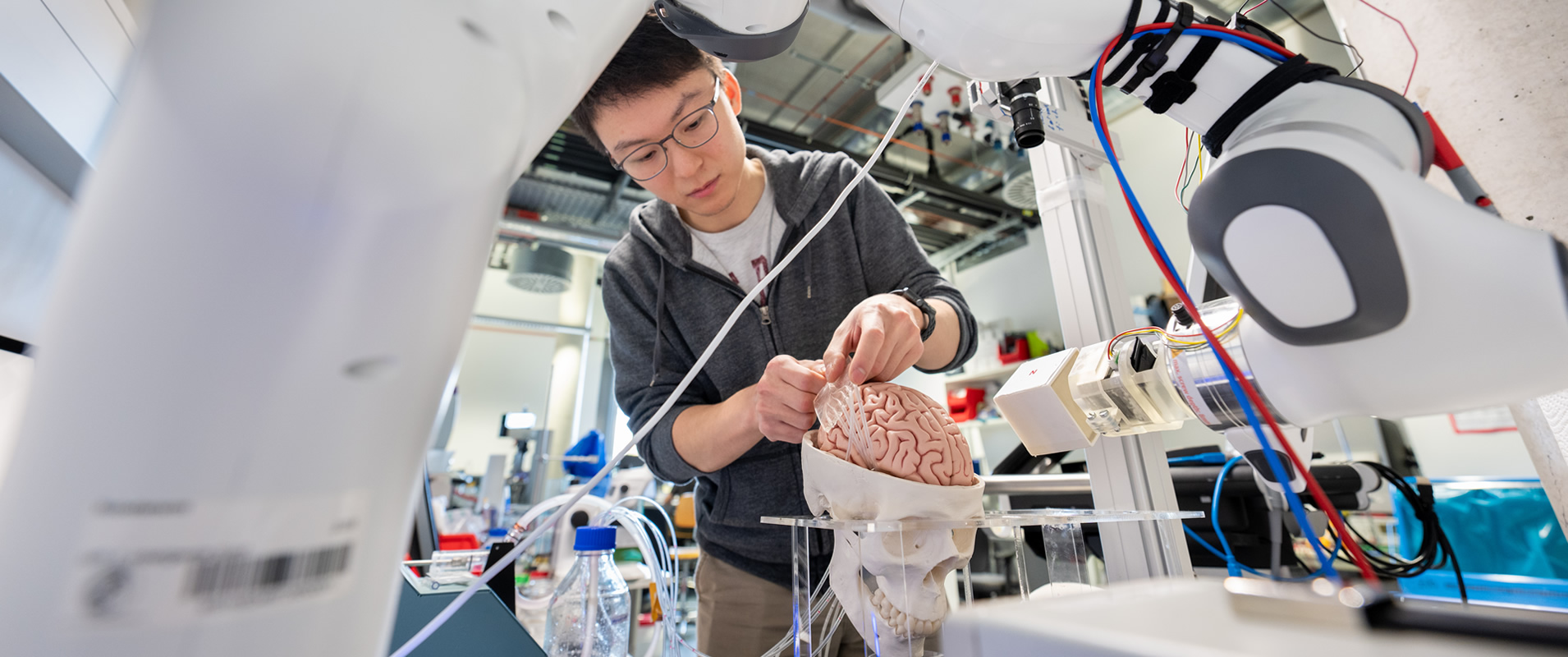
Das Max-Planck-Institut für Intelligente Systeme hat zwei Standorte in Stuttgart und Tübingen und verbindet Spitzenforschung in Theorie, Software und Hardware im Bereich der intelligenten Systeme unter einem Dach. Am Standort Tübingen wird mittels Forschung in den Bereichen Maschinelles Lernen, Maschinelles Sehen und Robotik untersucht wie intelligente Systeme Informationen verarbeiten, um wahrnehmen, handeln und lernen zu können. Unser Standort in Stuttgart beherbergt führende Expertise in den Bereichen Mikro- und Nano-Robotik, Haptik, Mensch-Maschine-Interaktion, bio-hybride Systeme sowie Medizinrobotik.





Das Max-Planck-Institut für Intelligente Systeme vereint unter seinem Dach mehrere Forschungsgruppen, die alle von einzigartigen Wissenschaftlern geleitet werden. Ihnen allen ist ein sicheres Budget zugeteilt. Diese Freiheit ermöglicht es ihnen, ihre Forschung voranzutreiben und sie bildet das Fundament für eine erfolgreiche Karriere als Wissenschaftler.

